







2026年4月28日
- 製品・サービス
- トピックス
- ナノイー
Adobe Acrobat Readerの特定のバージョンに、一部のPDFが開けないバグが発生しております。PDFが開けない場合、お使いのAcrobat Readerを最新版へアップデートの上お試しください。
2020年2月18日
製品・サービス / プレスリリース
近方から遠方250 m先まで高精度な三次元情報を取得可能
100万画素の縦積型APDで高解像度を実現
パナソニック株式会社 インダストリアルソリューションズ社は、近方から遠方250 m先にある物体位置に合わせた高精度な三次元情報を取得する、アバランシェフォトダイオード(APD[1])画素を用いたTime-of-Flight(TOF)方式[2]距離画像センサを開発しました。本センサは、車載用距離測定や広域の監視など、さまざまな分野への展開が可能です。
今回開発した新TOF方式距離画像センサは、2018年6月に当社が発表したAPD画素を用いたTOF方式距離画像センサの技術をもとに、電子増倍部と電子蓄積部とを縦積構成にすることでAPD画素の小面積化をはかり、世界最高となる100万画素の集積化を実現※1。また、これまで当社が開発してきた三次元距離画像の長距離計測と高解像度化に加え、一般のTOFセンサやLiDARでは困難であった高測距精度化との両立にも成功しました。これにより遠方での人・モノの重なりを精度よく検出することが可能となりました。
本開発は、以下の特長を有しています。
本開発は、以下の新規技術により実現しました。
光電子を増幅する電子増倍部と電子を保持する電子蓄積部を縦積構成にすることで、増倍性能を維持しながらAPD画素面積を大幅に低減しました。
光子(フォトン)[3]の到達回数を積算信号に変換し、近距離用に使われている間接TOF演算[4]を適用することで、10 mから100 mの長距離において10 cm間隔の距離精度を有する三次元距離画像化を実現しました。
一般的なTOFセンサは微弱な光信号が検知できないため、近距離のみの検知に限定。一方LiDARは、遠方まで検知できる反面、解像度が低いため小物体の特定は困難です。また、2018年6月に当社が発表したAPD搭載のTOF方式長距離画像センサ(APD-TOFセンサ)は、近距離から遠方までの小物体を検知できましたが、測距精度が最短でも1.5 m間隔で、遠方での人・モノの重なりを検出するには課題がありました。
産業/監視/車載センシングカメラ
本開発成果は、2020年2月17日に「2020 International Solid-State Circuits Conference」(2月16日~20日サンフランシスコで開催)で発表しました。
技術本部 センシングソリューション開発センター
APD_CIS@gg.jp.panasonic.com
一般的なTOFセンサなどの画像センサでは、画素に入った1光子は1電子にしか変換されないため、1光子程度の微弱な信号光に対してはノイズに弱く、感度の低さに課題がありました(図1左)。また、APDの一種であるSPAD(Single Photon Avalanche Diode)と呼ばれる信号増倍センサは、画素面積が大きく、微細化が困難という課題がありました(図1右)。新規縦積型APD(VAPD)では、光電変換部と電子増倍部および信号蓄積部を縦に積層することで小面積化をはかり、6 µmピッチの微細画素の形成に成功。これにより、信号増幅1万倍の高感度と100万画素の高解像度を両立した画像センサを実現しました(図1中)。
 図1. 一般センサと新規縦積型APDセンサの画素構造の比較図
図1. 一般センサと新規縦積型APDセンサの画素構造の比較図
一般的にTOF方式による距離計測は、光源から発した光子が物体に当たり、反射して戻ってくるまでの飛行時間を計測し距離を算出します(図2)。また、10 mを超える距離からの反射光は、1光子が届くか届かないかという確率的な信号になります。当社はこれまで、確率的に飛来する光子の到達回数を数える独自回路を全APD画素に内蔵し、1光子の微弱信号であっても確実に捉えることができる微弱光検知技術による独自の短パルスTOF方式で、250 m遠方まで1.5 m間隔の測距精度を有する三次元距離画像化技術を開発してきました(図3、図4)。今回新たに光子の到達回数を積算信号に変換し、近距離用に使われている間接TOF演算を適用した「積算フォトン分割間接TOF技術」を開発(図5)。これまで一般的なTOFセンサやLiDARでは困難であった、長距離(10 mから100 m)において、10 cm間隔の距離精度を有する三次元距離画像化を実現しました(図6、図7)。長距離計測と高解像度化に加え、高測距精度までを両立したことで、遠距離で重なった人や小さな物体の位置、形状でも判別可能な三次元距離画像が取得可能となりました(図8)。
 図2. 短パルスTOF方式の説明図
図2. 短パルスTOF方式の説明図
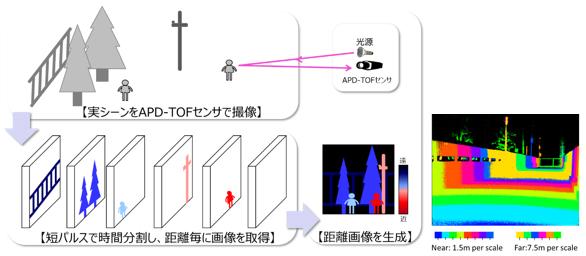 図3. APD-TOFセンサによる、短パルスを用いた距離毎の画像取得の原理説明と画像例
図3. APD-TOFセンサによる、短パルスを用いた距離毎の画像取得の原理説明と画像例
 図4. 遠方物体に対する画素内積算での検出原理の説明図
図4. 遠方物体に対する画素内積算での検出原理の説明図
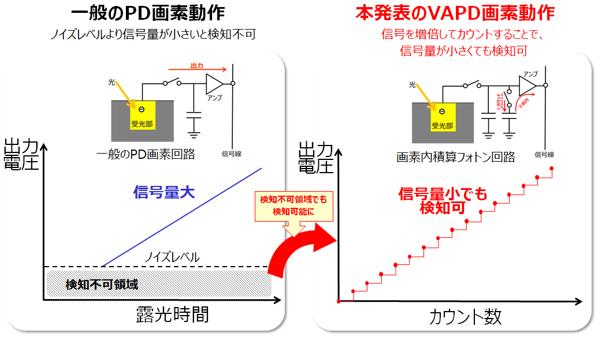 図5. 画素内積算回路による積算フォトン信号の説明図
図5. 画素内積算回路による積算フォトン信号の説明図
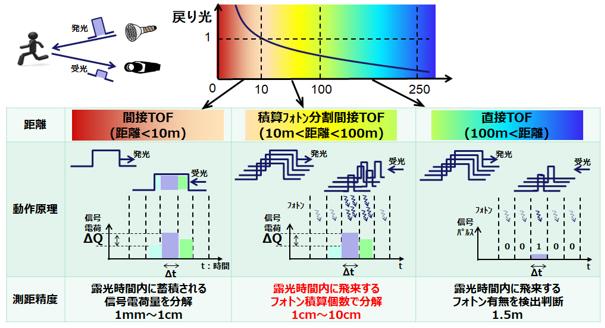 図6. APD-TOFセンサの物体距離に合わせた測距精度を実現する動作説明図
図6. APD-TOFセンサの物体距離に合わせた測距精度を実現する動作説明図
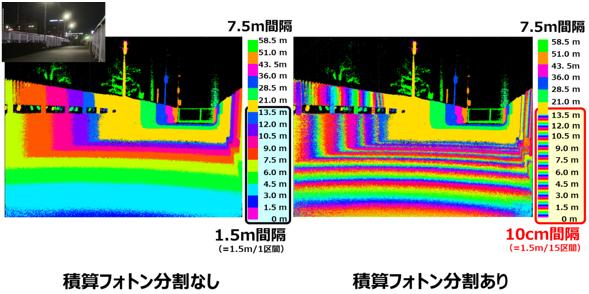 図7. 積算フォトン分割間接TOF技術で取得したAPD-TOFセンサの三次元距離画像
図7. 積算フォトン分割間接TOF技術で取得したAPD-TOFセンサの三次元距離画像
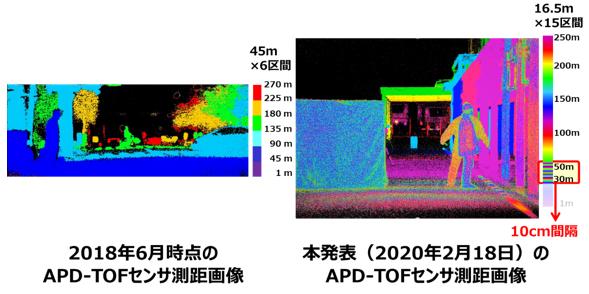 図8. 2018月6月時点と本発表のAPD-TOFセンサの測距画像の比較
図8. 2018月6月時点と本発表のAPD-TOFセンサの測距画像の比較
通常のフォトダイオードでは、1光子から1電子を生成します。一方、アバランシェフォトダイオード(APD)は、1光子から生成した1電子に強い電界を印加することで物質中の他の電子と強く衝突し、1個の電子が生成します。この衝突は、あたかも雪崩(アバランシェ)のように初期の衝突をトリガとして次々に大きくなりながら繰り返され、最終的には電子が1万倍以上に倍増します。SPAD(Single Photon Avalanche Diode)は、APDの一種です。
Time-Of-Flight(TOF)とは、光の飛行時間を意味しています。一般的なTOF方式の距離計測は光源と光検出器で構成されます。光源から発光した光は被写体にあたり、その反射光が検出器に到達します。その期間の光は光速で移動しています。空気中の光速は常に一定であることから、光の飛行時間を計測すれば物までの距離を計算することができます。この方式は、時間を直接計測することから、直接TOF方式と呼ばれます。
これ以下には分解できない、光のエネルギーの最小単位です。一般的なカメラで使用されるイメージセンサでは1光子程度のエネルギーを持つノイズがあるため、1光子の光信号の検出は難しいとされています。
光パルスをセンサのシャッタと同じ位相で照射し、光子の飛行時間の計算は戻ってきた光パルスの同期ずれ量を使用することにより、パルスの出射点と対象物との間の距離を演算する方法です。従来の近距離用のTOFカメラで採用されている演算方式です。
2018年6月プレスリリース「TOF方式長距離画像センサを開発」
以上
記事の内容は発表時のものです。
商品の販売終了や、組織の変更などにより、最新の情報と異なる場合がありますので、ご了承ください。

















