

人手不足などの社会課題を解決するため、自律移動ロボットの活躍が期待されている。そのような中、パナソニックはロボットの自律移動に必要な広い視野を実現する"眼"として、産業用の『3D LiDAR』を開発した。
自律移動ロボットの"眼"に着目
製造・物流の現場では昨今、グローバル化やeコマース市場の拡大による物流量の増加や人手不足、人件費高騰などを背景に、ロボットの活用による自動化や省人化が期待されている。ロボットの中でも、特に人との協働作業が可能な自律移動ロボットへの注目が高まっており、その市場が今後急速に拡大すると考えられている。
自律移動ロボットを、ガイドなしで人が行き交う施設内や屋外で使用するためには、ロボット自身に、前方や左右に加えて、路面の凹凸や段差などを検知する、より広い視野が必要となる。つまり、自身の周辺空間をリアルタイムで把握する、人間と同じような"眼"が求められる。
車載用とはスペックが異なる、自律移動ロボット用のLiDAR
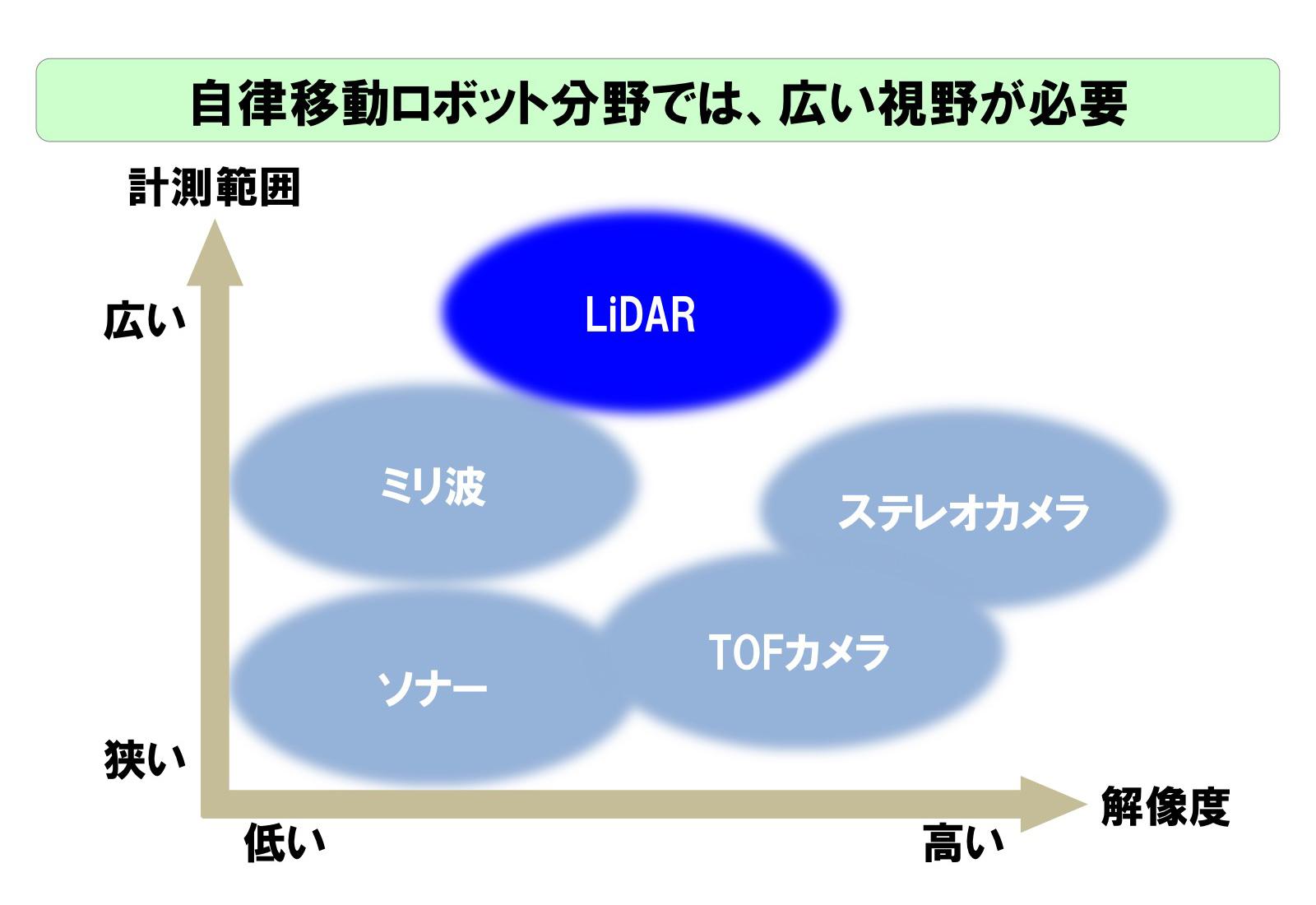
ロボットの眼を実現するセンサはいくつかあるが、計測範囲と解像度の観点で分類すると、自律移動ロボットの"眼"には計測範囲が広いことが特徴であるLiDAR (Light Detection and Ranging) が適している。
LiDARは、レーザ光を用いた距離を測定するセンサで、測定原理は、照射したレーザが対象物に当たり、跳ね返ってきた光が受光素子に届くまでの時間から距離を計測するというものだ。
-
空間を把握するセンサ
-

LiDAR (Light Detection and Ranging) とは?
LiDARといえば、車載用がイメージされるが、車は時速数十キロメートルと高速で移動するため、長距離計測を重視し、垂直検知の範囲は狭い。一方、人が歩いているところを自律移動するロボットは、ロボット自身の足元や路面、および周囲を広範囲に見る必要がある。そのため車載と自律移動ロボットでは必要とされるスペックが異なってくる。
従来、移動ロボットの障害物検知を行う場合は、車載用のLiDARと他のセンサを組み合わせて使用しており、ロボット制御システムの構成が複雑となることが課題だった。

車と自律移動ロボットに必要な検知範囲の違い
独自構造のレーザスキャン方式で広角スキャンを実現
そこで当社は、自律移動ロボット向けに、広範囲の三次元距離計測を実現した『3D LiDAR』を開発した。
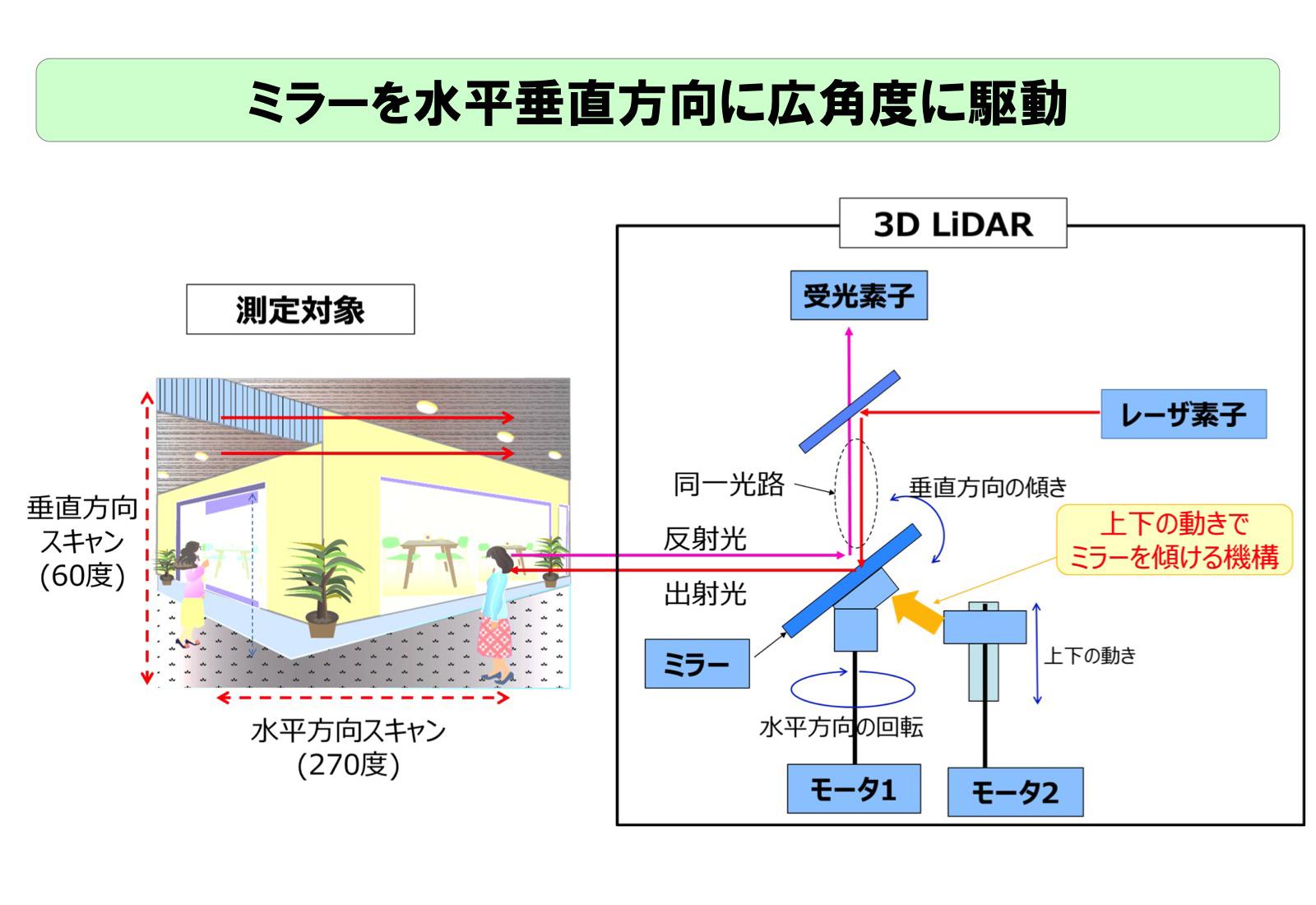
この『3D LiDAR』 は、1つのレーザ素子、1枚のミラー、2つのモータで構成され、ミラーを水平・垂直方向に広角度に駆動可能な独自構造を用いたレーザスキャン方式を採用。具体的には、モータ1でミラーを水平方向に回転させながら、モータ2で垂直方向にも回転できる機構設計で、垂直方向60度、水平方向270度の広角スキャンを実現した。ここには、光ディスクドライブ事業で培った機構設計技術とノウハウが詰め込まれている。

三次元距離センサ 3D LiDAR
広角スキャンを実現した独自構造のレーザスキャン方式
これにより、センサ1つでロボットの足元や路面状態が把握できるようになり、ロボットの走行制御システムの構成をシンプルにし、ロボット開発期間の短縮、製品コストの低減に貢献できる。

広範囲の三次元距離計測を実現
特長1)広範囲の三次元計測を実現
■対象物までの距離を測定
以下動画画面上の上部がカメラ画像。下部がスキャンした三次元距離画像。対象物の遠近が色で示されている。近くは赤色、遠くになると黄色に近づく。
また、垂直方向のスキャン範囲や解像度も数種類のモードから設定可能。利用シーンに応じて、広く細かく検知したり、広さはそのままに解像度を粗くしたり、検知範囲を限定することで、ロボットの安定かつ効率的な走行を実現できる。
特長2)垂直方向のスキャン範囲、解像度を任意設定
さらに、屋外の日照環境下での使用については、出射レーザ光と物体で反射して戻ってくる光の光路を同一になるように設計することで、太陽光によるノイズ発生を低減。周囲の明るさに関係なく、高精度な計測が可能だ。
特長3)周囲の明るさに関係なく、高精度な計測が可能
自律移動ロボットの普及加速に貢献
パナソニックがこのたび開発した『3D LiDAR』は、自動搬送機や宅配ロボットといった自律移動ロボットやサービスロボットなど、低速で動くものへのニーズを想定している。また、広範囲の計測ができる特長を生かし、セーフティ市場への展開、また、明るさに関係なく測定できる特長を生かして、セキュリティ市場への展開も可能。今後ますます『3D LiDAR』の利用シーンは広がっていくことが考えられる。
当社は、労働力不足などの社会課題の解決に向けて、自律移動ロボットの使用シーンとその普及加速に貢献していくため、2018年1月にサンプル出荷、2018年度末には量産開始を目標とし、本製品のさらなる開発を進めていく。

広がる用途展開



















