
松下電器産業株式会社 パナソニック システムソリューションズ社(代表者 遠山敬史)は、総務省の研究開発プロジェクト「ユビキタスセンサーネットワーク技術に関する研究開発(2005年度)」※2の一環として、「センサーノード※3搭載型ロバスト顔認証※4」に関する技術検証を “秋葉原ユビキタス実証実験スペース※5”(秋葉原ダイビル)において7月27日より開始します。
これは、不審人物の認知や空港・港湾における国際犯罪を防止する顔画像認証によるバイオメトリクス出入国管理等に必要なセンシングデータ処理技術※6を確立することを目的に、東京大学森川研究室や慶應義塾大学青山教授、Ubilaプロジェクト※7等と学産・プロジェクト間連携により実施するものです。
当社は、主に以下3点の検証を行います。これは、従来屋内でほぼ正面の顔画像以外には適用することが難しかった顔認証技術を、屋外に設置されるセンサーノードにも搭載可能なものに高度化し、より広範囲で柔軟な入退室制御や動作追跡等を実現するものです。そのために屋内・屋外において比較的長距離でも認証できる「顔画像認証のロバスト性の向上」を図ります。
| (1)正面顔の画像を逆推定する特徴点検出技術※8の検証: | |
| 顔の向きの変化に対するロバスト性を強化し、正面画像合成による顔認証精度の向上を目的とします。 | |
| (2)統計モデルに基づく任意照明顔画像合成技術※9の検証: | |
| 照明変動へのロバスト性を強化し、屋外での照明変動や異なる照明条件での顔認証精度の向上を目的とします。 | |
| (3)被撮像者の行動予測・誘導技術の研究: | |
| 顔画像の撮像に際して、被撮像者が意識をしない状態でも、常に安定した顔画像を取得するため、その行動を「振る舞い」としてとらえ、システムから被撮像者への働きかけと被撮像者の振る舞いの関係を評価することで、行動の予測・誘導技術の検証を行います。 | |
なお、7月27日に報道関係者様向けの共同発表会を開催し、技術検証のコンセプトと狙いをご紹介するとともに、実証実験の一部のデモンストレーションを行います。
| (日時) | 2006年7月27日 15:00−16:30 | |
| (場所) |
〒101-0021 東京都千代田区外神田1-18-13 ダイビル13F 1303号室 http://www.mlab.k.u-tokyo.ac.jp/akihabara/ |
|
※一般のお客様は7月27日以降に秋葉原ユビキタス実証実験スペース問い合わせ先(次ページ記載)へご確認ください。
【報道関係者様問い合わせ先】
松下電器産業株式会社 パナソニック システムソリューションズ社 コミュニケーションチーム 遠田(えんだ) 電話:045-540-5321 Eメール:pss_pr@ml.jp.panasonic.com URL:http://panasonic.co.jp/pss/

JR「秋葉原駅」徒歩1分、地下鉄日比谷線「秋葉原駅」徒歩4分
地下鉄銀座線「末広町駅」徒歩5分、つくばエクスプレス「秋葉原駅」徒歩3分
<秋葉原ユビキタス実証実験スペースへの問い合わせ先>
東京大学 森川研究室 担当 川西、宮島 電話:04-7136-3897
Eメール:akihabara@mlab.k.u-tokyo.ac.jp
【検証実験の背景】
近年、急激に進むグローバル化に伴いテロ対策等で危機管理への意識が高まっており、空港・駅等の大規模空間には多くの防犯カメラが設置されるなど、セキュリティ強化に向けた対策が検討・実施されつつあります。
これまでも、顔画像認証による出入国管理技術が広く研究開発されていますが「任意に撮像された向きが異なる顔画像」や「照明変動を受ける条件、もしくは異なる照明条件で撮像された顔画像」での認証精度の向上に課題がありました。また、特に屋外での顔画像の撮像に際しては、被撮像者がカメラを意識しない状態であるために、その環境や周囲の状況によって被撮像者の「振舞い方」が異なり、安定した顔画像データを取得するには限界がありました。そのために、単に防犯カメラでの撮像・画像処理技術の高度化のみならず、センシングデータ処理技術との融合で、被撮像者の行動を予測・誘導できるコンテクストアウェアネス技術※10の研究開発が急務でした。
これに対して当社は「ユビキタスセンサーネットワーク技術の研究開発」を受託し、センサーノードでの顔画像認識による個人認証を行なう技術開発を行なっています。
一定の位置からの人物の画像しか得られない、従来のセンサー単体による画像入手に対して、様々な顔の向きで街中を往来する「被認証行為を意識しない」通行人等の認証精度を高めるために、オープンネットワークを介して、複数の異種あるいは同種のセンサーを連携させる技術を開発し、人感センサーなどのセンサー情報を活用して認識対象を特定したり、複数のカメラの認証結果を統合することにより、より高い精度での認証が可能になります。
さらに、センサーからの情報に応じて照明等のアクチュエータ※11を適切に制御する方法を研究することにより、環境条件をより認証に適した状態に改善し、認証の対象者に無意識かつ自然に被認証に適した「振る舞い」へ誘導することが可能になります。
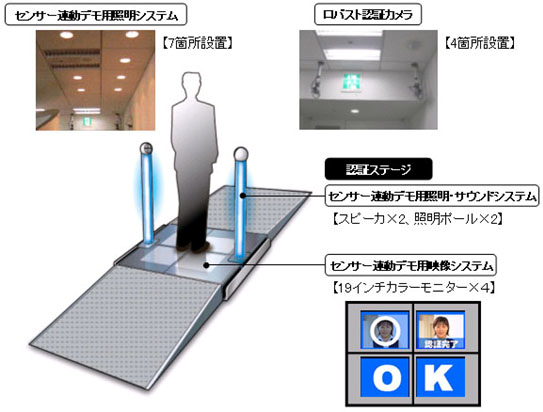
【検証概要】
本検証では、デモスペースの入口部に、複数の防犯カメラ・デモ用照明および認証結果を表示する床面モニター・照明・スピーカを設置します。防犯カメラとネットワークで接続された人感センサーが入室者を感知した時点で、天井の照明を点灯させカメラによる顔認証を開始します。カメラによる顔認証の結果に応じて、床面のモニターの表示・照明ポールの点灯・スピーカからの音声の送出などを制御します。これにより下記の検証・検討が可能となります。
1)ロバスト顔認証の性能評価
2)複数カメラの連動による認証精度の改善検証
3)インセンティブの与え方(認証結果の示し方)による認証精度の変化
【技術検証イメージ】
【実用化時期】
当社は、2007年度以降に、このような国民の安全に資するユビキタスセンサーネットワークシステムを実用化することで、テロ・国際犯罪対策等国際社会に共通な課題解決を実現するだけでなく、国民が安心して生活できるユビキタスネットワーク時代の安全な社会・街づくりの実現に貢献していきます。
| ※1 | ユビキタスセンサーネットワーク:人やモノの状況や周辺状況を認識しその動的な情報を発信するために高度なセンシングや映像認識とネットワークが結びついたもの。分散配置された様々なセンサーが自律的にネットワークを形成し、そのネットワークを通じてセンサーから収集された情報が連携することで、様々な分野やサービスに活用できます。医療・健康、防犯・セキュリティ、防災、農産物等の各種生産現場、環境リスクへの対応等、幅広い社会・経済活動への寄与と安全・安心な社会を実現するための鍵として期待されています。 |
| ※2 | 詳細は、http://panasonic.co.jp/pss/rd/usn/ をご覧ください。 |
| ※3 | センサーノード:様々なサービスを可能とするマルチセンシング機能を持つ無線通信端末。 |
| ※4 | ロバスト顔認証:robust(ロバスト)は直訳すれば「堅牢さ」のことですが、生体認証の分野においては、以下のような特性を表します。例えば、顔画像は同一人物であっても、照明条件や顔の向き・表情・加齢・メガネなどの着用など様々な要因によって変動します。これらの「条件変動」によって顔認証の精度は低下しますが、この認証精度の低下を起しにくい特性をロバスト性と呼びます。 |
| ※5 | 秋葉原ユビキタス実証実験スペース:多種多様な実証実験を可能とするために東京大学森川研究室(旧青山・森川研究室)が中心となって構築した実験スペース。実験室内の柱は、設置場所を10センチメートル刻みで移動できるほか、ケーブルの配線や小型センサーの設置などを自在に行うことができ、ユビキタス空間を容易に構築することが可能です。 |
| ※6 | センシングデータ処理技術:センシングした情報を、センサー、ネットワーク、上位システムの各段階で、適切な処理(単位化、比較・選定、識別、抽象化等)を行う技術。 |
| ※7 | Ubilaプロジェクト:KDDI株式会社、九州工業大学、慶應義塾大学、株式会社KDDI研究所、東京大学、日本電気株式会社、富士通株式会社の7法人・機関による、総務省の研究開発プロジェクト「ユビキタスネットワーク技術の研究開発 ユビキタスネットワーク制御・管理技術」 の略称 http://www.ubila.org/ |
| ※8 | 特徴点検出技術:顔画像の中から、目(目尻・目頭)・眉・鼻・口(口唇上下端・口角など)などの位置を特定する技術。 |
| ※9 | 統計モデルに基づく任意照明顔画像合成技術:未知の人物の1枚の顔画像から顔の形状などを統計的に推定し、この推定結果に基づいて異なる照明条件下の顔画像を生成する技術。 |
| ※10 | コンテクストアウェアネス技術:人やモノの状況や周辺状況を認識する技術。 |
| ※11 | アクチュエータ:センサーが外界の光や音などを感知して信号に変換する装置であるのに対して、アクチュエータは内部の信号に応じて光や音、モータなどの物理運動を発生させ外界に働きかける装置全般を指すものです。 |





