








2026年1月5日
- 製品・サービス
- プレスリリース
- テクノロジー
- ソフトウェア
- モビリティ
- サービス
Adobe Acrobat Readerの特定のバージョンに、一部のPDFが開けないバグが発生しております。PDFが開けない場合、お使いのAcrobat Readerを最新版へアップデートの上お試しください。
2017年9月11日
製品・サービス / プレスリリース
自律移動ロボットの普及を加速
利用シーンに応じて、スキャン範囲と解像度を変更可能

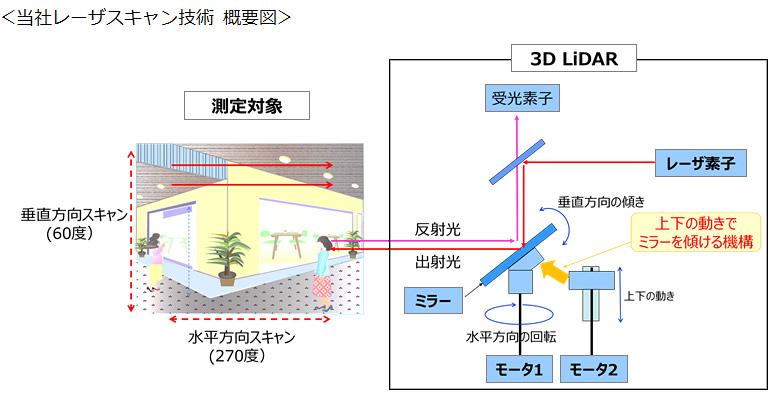
パナソニック株式会社 オートモーティブ&インダストリアルシステムズ社は、周囲にある物体までの距離と方向を正確に計測できる三次元距離センサ3D LiDAR [1] を開発しました。本開発品は独自構造を用いたレーザスキャン技術により、垂直方向60度、水平方向270度の広角スキャンを実現しました。距離計測空間の拡大により、自律移動ロボット [2] の安定走行に貢献します。
本開発品は、特に垂直方向の計測範囲が広く、自律移動ロボットに適用した場合に路面上の障害物や路面の凹凸状態の正確な検知が可能です。加えて、スキャン範囲や解像度を可変できるため、利用シーンに適した計測を実現、人が行き交う施設内や屋外を走行する自律移動ロボットの普及加速に貢献します。
本開発品は、独自構造を用いたレーザスキャン技術を適用し、以下の特長を有しています。
ロボットを人が行き交う施設内や屋外で自律移動させるには、ロボットの前方、左右方向だけでなく、路面状況の把握が必要です。車載用途で使用される3D LiDARでは、レーザの垂直スキャン範囲が不足し、単一センサでは路面状況を正確に把握することができず、結果として他センサと組み合わせる必要がありました。そのため、走行制御システムの構成が複雑になることが課題でした。
自律移動ロボット(自動搬送機、宅配ロボットなど)、フォークリフト、農業機械、建設機械、セキュリティシステム
サンプル出荷予定:2018年1月
本製品は、2017年10月3日~10月6日まで幕張メッセで開催される「CEATEC JAPAN 2017」に出展します。
https://industrial.panasonic.com/jp/products-rd/3dlidar?ad=press20170911
車載用途で使用される3D LiDARは、広範囲かつ路面状況を検知したいという産業用途での要望に対し、単一センサでは対応できませんでした。当社は、光ディスクドライブ事業で培った光学設計技術とモータ制御技術の活用により、独自構造を用いたレーザスキャン技術を開発し、垂直方向60度、水平方向270度の広角スキャンを実現しました。これにより、単一センサによる広範囲な三次元距離計測を可能とし、他センサと組み合わせることなく、自律移動ロボットの走行制御システムの構成を単純にすることが可能となります。
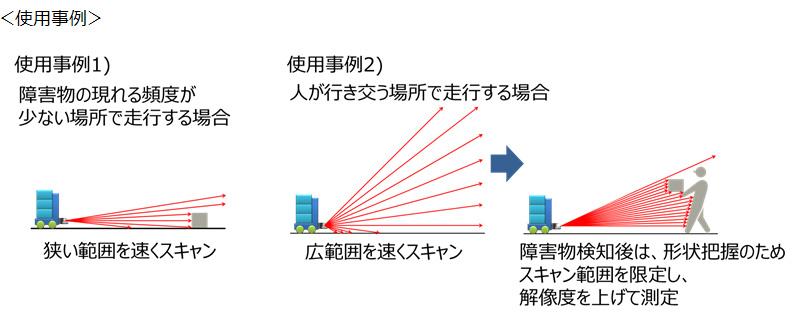
自律移動ロボットでは、走行場所など環境によって障害物検知が必要な範囲は変化します。例えば、路面の凹凸がなく、障害物が現れる頻度が少ない場所での走行では、路面状況を詳細に検知する必要はなく、狭い範囲をロボットの走行速度に合わせて速くスキャンすることが必要です。一方、人が行き交うような場所での走行では、路面からロボットの高さ相当までの広範囲の状況把握が求められます。更に、障害物を検知した場合には、障害物の詳細な形状把握が必要となる場合もあります。本開発品は、独自構造を用いたレーザスキャン技術により、垂直方向のスキャン範囲と解像度を数種類のモードから設定できるようにしました。これにより、利用シーンに適したスキャン範囲や解像度で距離計測が可能となり、ロボットの安定かつ効率的な走行を実現します。
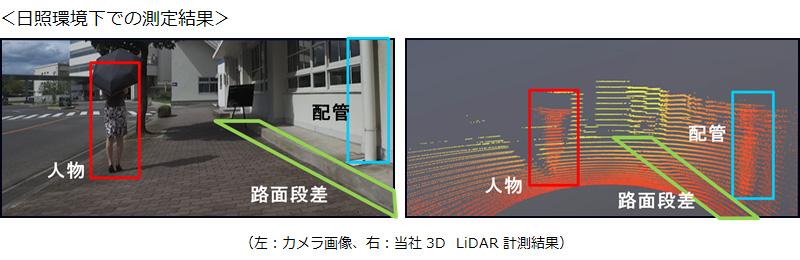
ロボットを屋外で使用する場合、日照環境下でも使用できることが求められます。本開発品は、出射レーザ光と物体で反射して戻ってくる光の光路を同一になるように設計することで、太陽光によるノイズ発生を低減しました。これにより、真夏の炎天下相当である100,000ルクス [3] の照度下においても高精度な計測が可能です。
| 項目 | 特性 |
|---|---|
| スキャン範囲 | 水平270度、垂直0度 ~ 60度(可変) |
| 垂直解像度 | 1.5度/3.0度/7.5度の3種類から選択可能 |
| 検出距離範囲 | 0.5 m ~ 50 m |
| フレームレート | 5 fps ~ 25 fps |
| 周囲照度 | ~ 100,000ルクス(太陽光下) |
| 外形寸法 | 高さ130 mm × 幅120 mm × 奥行き140 mm |
以上
記事の内容は発表時のものです。
商品の販売終了や、組織の変更などにより、最新の情報と異なる場合がありますので、ご了承ください。




